brickup
Tobias
Renate
Suche
Familie Buckdahn
Kreativität, IT und Selbstironie - viel Spaß beim Stöbern :)
Disney Babies
Plattencover
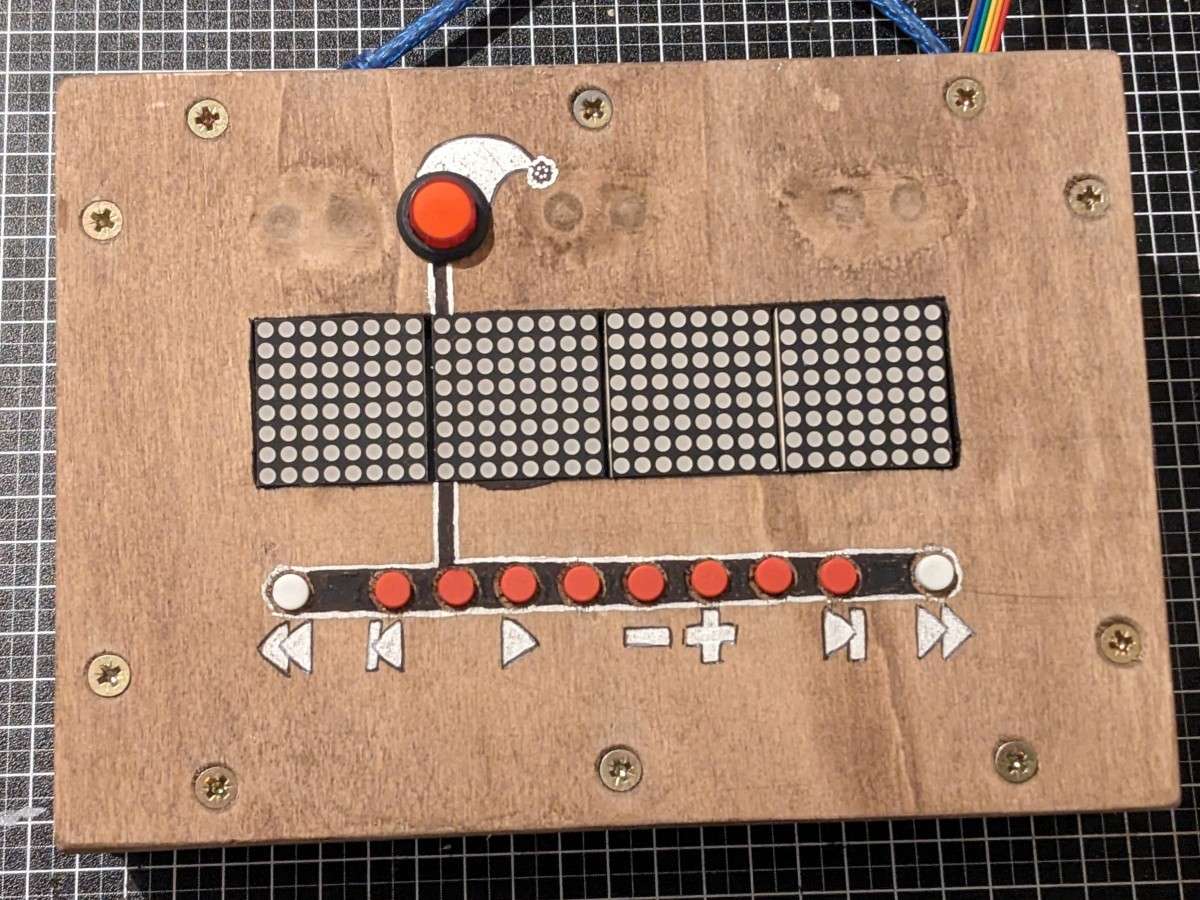
Weihnachtslichter-Steuerung
Comicfiguren
Der erste Schnee
Regenbogen-Allee
Arduino-LEGO-Buzzer
Geisterstunde
Glockenspieler
Länderrätsel